A Deep Residual Shrinkage Network è na varianti migghiurata dâ Deep Residual Network. Nta sostanza, è na ntegrazzioni di Deep Residual Network, attention mechanisms, e funzioni di Soft thresholding.
Nta un certu sensu, u principiu di funzionamentu dâ Deep Residual Shrinkage Network si pò capiri accussì: usa i attention mechanisms pi identificari i features ca nun sunnu mpurtanti e usa i funzioni di Soft thresholding pi impustàrili a zeru; ô cuntrariu, identifica i features mpurtanti e i manteni. Stu prucessu migghiura a capacità dâ deep neural network di estràiri features ùtili di signali ca cuntenunu noise.
1. Motivazzioni dâ Ricerca
Prima di tuttu, quannu classificamu i campiuni, a prisenza di noise — comu Gaussian noise, pink noise, e Laplacian noise — è inevitàbili. Cchiù in ginirali, i campiuni spissu cuntenunu nfurmazzioni ca nun c’entrano nenti cu u task di classificazzioni currenti, e chistu si pò vidiri macari comu noise. Stu noise pò aviri effetti negativi supra a performance dâ classificazzioni. (U Soft thresholding è un passu chiavi nta assai algoritmi di signal denoising.)
Pi esempiu, duranti na cunversazzioni ô latu dâ strata, l’audio pò essiri ammiscatu cu i soni di clacson e roti. Quannu facemu speech recognition supra sti signali, i risurtati sunnu pi forza nfruenzati di sti soni di suttafunnu. Dâ pruspittiva dû deep learning, i features ca currispunnunu ê clacson e ê roti avìssiru a essiri eliminati dintra a deep neural network pi evitari ca nfruenzanu i risurtati dû speech recognition.
Secunnu, macari dintra u stessu dataset, a quantità di noise spissu cancia di campiuni a campiuni. (Chistu havi punti in cumuni cu i attention mechanisms; pigghiannu comu esempiu un image dataset, a pusizzioni di l’uggettu target pò essiri diversa tra i vari mmàggini, e i attention mechanisms ponnu fucalizzàrisi supra a pusizzioni spicìfica di l’uggettu target in ogni mmàggini.)
Pi esempiu, quannu addestramu un cat-and-dog classifier, cunziddiramu cincu mmàggini etichettati comu “cani”. A prima mmàggini putissi aviri un cani e un surci, a secunna un cani e un oca, a terza un cani e un puddru, a quarta un cani e un sceccu, e a quinta un cani e na papira. Duranti u training, u classifier sarà inevitabbilmenti suggettu a nterferenzi di uggetti irrelevanti comu surci, ochi, puddri, scecchi e papiri, purtannu a na diminuzzioni dâ pricisioni dâ classificazzioni. Si putìssimu identificari sti uggetti irrelevanti — i surci, l’ochi, i puddri, i scecchi e i papiri — e eliminari i features currispunnenti, fussi pussìbili migghiurari l’accuratezza dû cat-and-dog classifier.
2. Soft Thresholding
U Soft thresholding è un passu funnamintali nta assai algoritmi di signal denoising. Elimina i features ca hannu valuri assoluti cchiù vasci di na certa threshold e “restringi” (shrinks) i features ca hannu valuri assoluti cchiù àuti versu u zeru. Si pò implementari usannu a siguenti fòrmula:
\[y = \begin{cases} x - \tau & x > \tau \\ 0 & -\tau \le x \le \tau \\ x + \tau & x < -\tau \end{cases}\]A dirivata dû output dû soft thresholding rispettu all’input è:
\[\frac{\partial y}{\partial x} = \begin{cases} 1 & x > \tau \\ 0 & -\tau \le x \le \tau \\ 1 & x < -\tau \end{cases}\]Comu si vidi supra, a dirivata dû soft thresholding è 1 o 0. Sta pruprietà è identica a chidda dâ ReLU activation function. Dunca, u soft thresholding pò macari ridùciri u rìsicu ca i deep learning algorithms scuntranu u gradient vanishing e u gradient exploding.
Nta soft thresholding function, l’impostazzioni dâ threshold havi a rispittari dui cundizzioni: prima, a threshold havi a essiri un nùmmuru pusitivu; secunna, a threshold nun pò essiri cchiù granni dû valuri màssimu dû signali di input, sinnò l’output sarà tuttu zeru.
Inoltre, è prifirìbbili ca a threshold rispetta na terza cundizzioni: ogni campiuni avissi aviri a so threshold indipendenti basata supra u so cuntinutu di noise.
Chistu pirchì u cuntinutu di noise spissu cancia tra i campiuni. Pi esempiu, è cumuni dintra u stessu dataset ca u Campiuni A cunteni menu noise mentri u Campiuni B cunteni cchiù noise. Nta stu casu, quannu si fa soft thresholding nta un denoising algorithm, u Campiuni A avissi a usari na threshold cchiù nica, mentri u Campiuni B avissi a usari na threshold cchiù granni. Macari si sti features e thresholds pèrdinu i so definizzioni fìsichi espliciti nê deep neural networks, a lògica di basi arresta a stessa. In autri paroli, ogni campiuni avissi aviri a so threshold indipendenti ditirminata dû so spicìficu cuntinutu di noise.
3. Attention Mechanism
I Attention mechanisms sunnu rilativamenti fàcili di capiri ntô campu dâ computer vision. I sistemi visivi di l’armali ponnu distìnguiri i target scannannu rapidamenti tutta l’aria, e appoi fucalizzannu l’attinzioni supra l’uggettu target pi estràiri cchiù dettagli mentri supprimunu i nfurmazzioni irrelevanti. Pi i dettagli, pi favuri faciti rifirimentu â littiratura supra i attention mechanisms.
A Squeeze-and-Excitation Network (SENet) rapprisenta un mètudu di deep learning rilativamenti novu ca usa attention mechanisms. Tra diversi campiuni, u cuntribbutu di diversi feature channels ô classification task spissu cancia. SENet usa na sub-network nica pi ottèniri un set di weights (“Learn a set of weights”) e appoi murtìplica sti weights pi i features dî canali rispittivi pi agghiustari a grannizza dî features in ogni canali. Stu prucessu si pò vìdiri comu l’applicazzioni di vari livelli di attinzioni a diversi feature channels (“Apply weighting to each feature channel”).
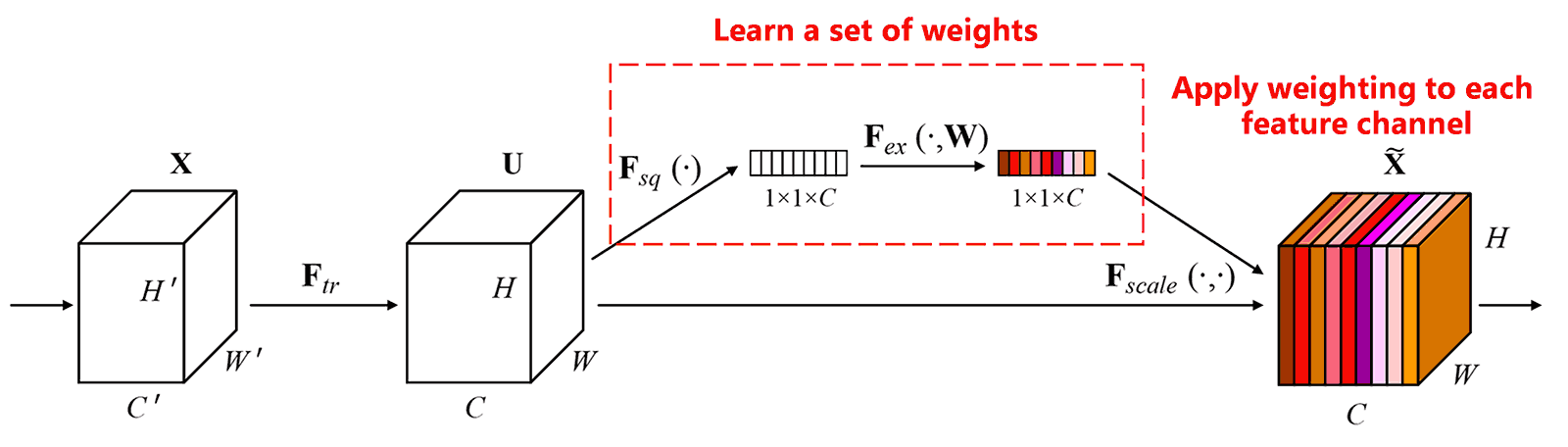
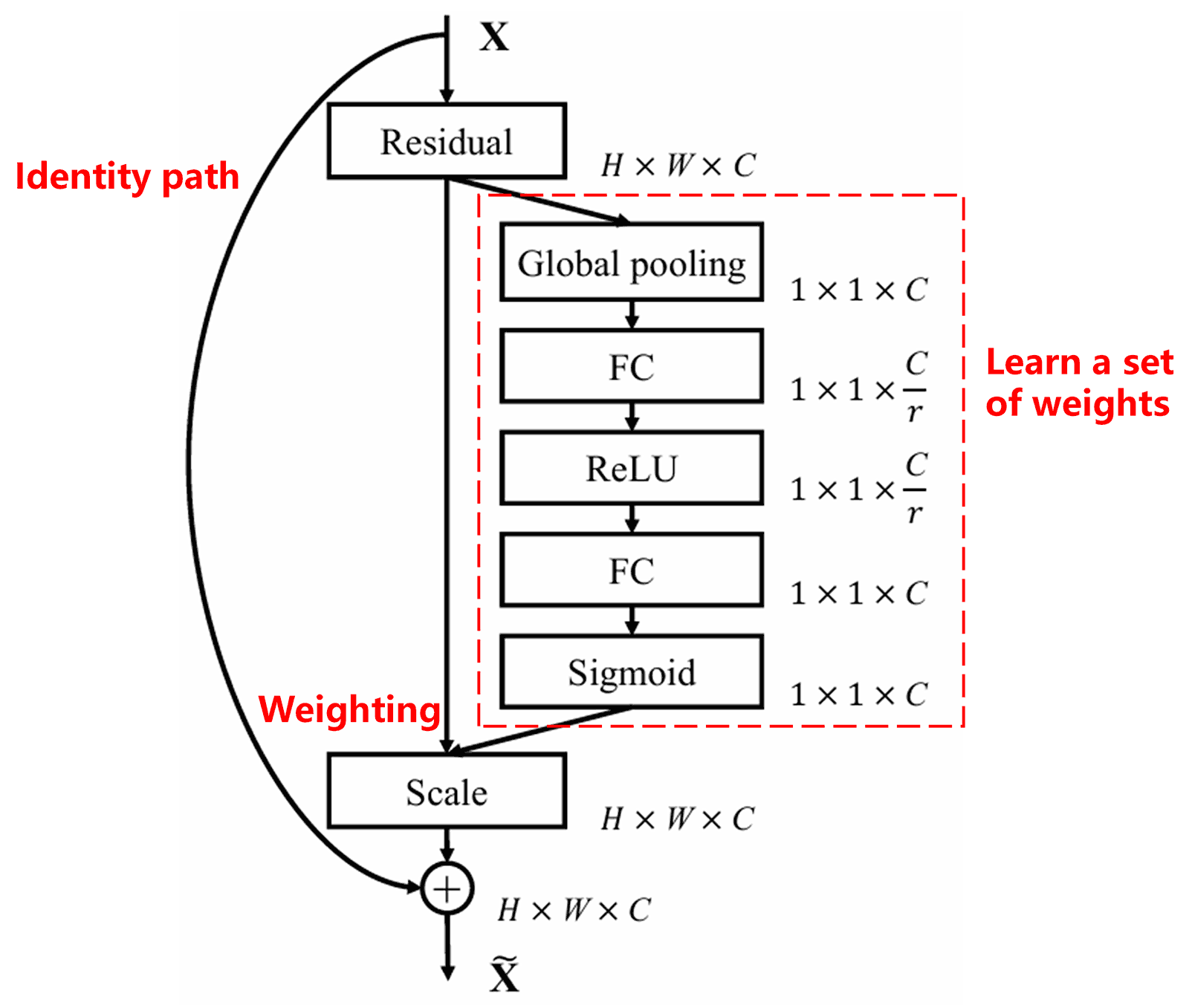
Nta stu approcciu, ogni campiuni pussedi u so set indipendenti di weights. In autri paroli, i weights pi du’ campiuni arbitrari sunnu diversi. Nta SENet, u percursu spicìficu pi ottèniri i weights è “Global Pooling → Fully Connected Layer → ReLU Function → Fully Connected Layer → Sigmoid Function.”
4. Soft Thresholding cu Deep Attention Mechanism
A Deep Residual Shrinkage Network pigghia ispirazzioni dâ struttura dâ sub-network SENet sopra muntuvata pi implementari u soft thresholding sutta un deep attention mechanism. Tramiti a sub-network (indicata dintra u riquadru russu), si pò imparari un set di thresholds (“Learn a set of thresholds”) pi applicari u Soft thresholding a ogni feature channel.
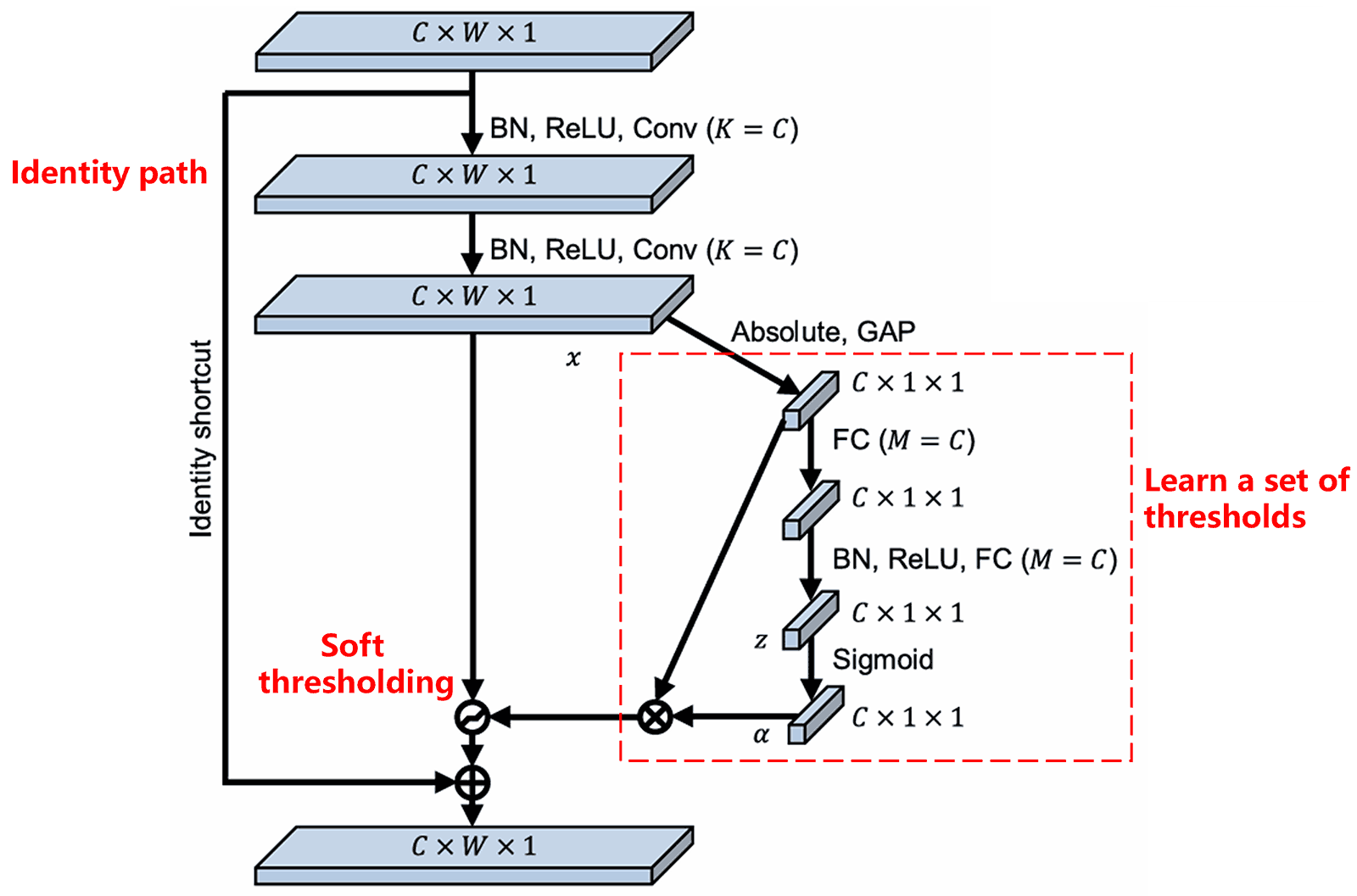
Nta sta sub-network, prima si càlculanu i valuri assoluti di tutti i features ntâ input feature map. Appoi, tramiti global average pooling e facennu a media, si otteni un feature, denotatu comu A. Nta l’autru percursu, a feature map doppu u global average pooling veni data in input a na nica fully connected network. Sta fully connected network usa a Sigmoid function comu strata finali pi normalizzari l’output tra 0 e 1, duna un coefficienti denotatu comu α. A threshold finali si pò esprìmiri comu α×A. Dunca, a threshold è u pruduttu di un nùmmuru tra 0 e 1 e a media dî valuri assoluti dâ feature map. Stu mètudu assicura ca a threshold nun è sulu pusitiva ma macari ca nun è eccessivamenti granni.
Inoltre, campiuni diversi pòrtanu a thresholds diversi. Di cunsiguenza, nta un certu sensu, chistu si pò ntèrpritari comu un attention mechanism spicializzatu: nota i features irrelevanti pi u task currenti, i trasforma in valuri vicini a zeru tramiti du’ convolutional layers, e i imposta a zeru usannu u soft thresholding; in alternativa, nota i features rilevanti pi u task currenti, i trasforma in valuri luntani di zeru tramiti du’ convolutional layers, e i priserva.
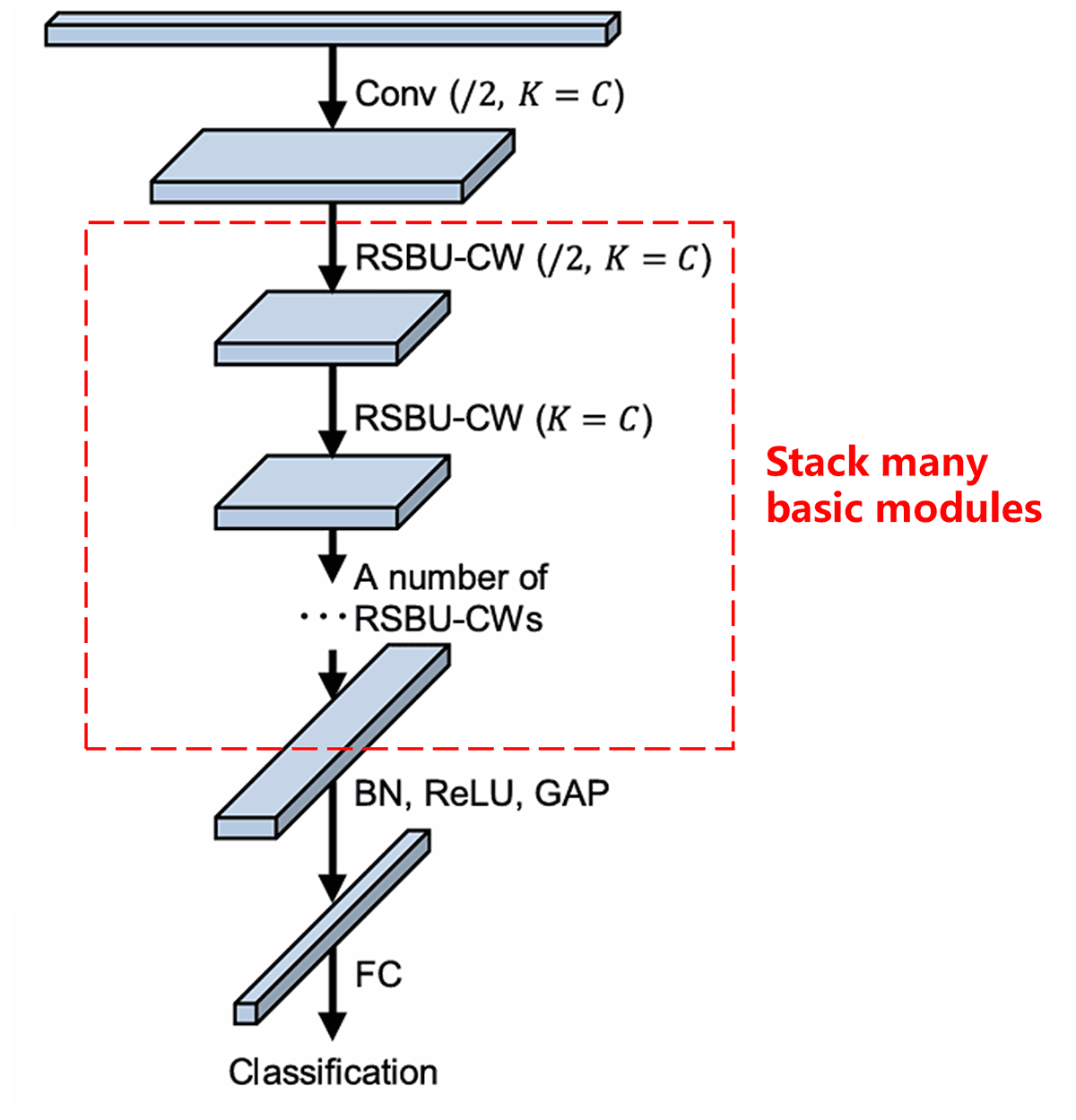
Finalmenti, mittennu unu supra l’autru (Stacking) un certu nùmmuru di basic modules (“Stack many basic modules”) nsemmula a convolutional layers, Batch Normalization, activation functions, global average pooling, e fully connected output layers, si costruisci a Deep Residual Shrinkage Network cumpleta. Nota ca ntô schema c’è macari un Identity path e l’operazzioni di Weighting.
5. Capacità di Generalizzazzioni
A Deep Residual Shrinkage Network è, di fattu, un mètudu ginirali di feature learning. Chistu pirchì, nta assai feature learning tasks, i campiuni cchiù o menu cuntenunu qualchi noise e macari nfurmazzioni irrelevanti. Stu noise e i nfurmazzioni irrelevanti ponnu nfruenzari a performance dû feature learning. Pi esempiu:
Nta image classification, si na mmàggini cunteni cuntimpuraniamenti assai autri uggetti, sti uggetti ponnu essiri caputi comu “noise”. A Deep Residual Shrinkage Network putissi essiri in gradu di usari l’attention mechanism pi notari stu “noise” e appoi usari u soft thresholding pi impustari i features currispunnenti a stu “noise” a zeru, putennu accussì migghiurari l’accuratezza dâ image classification.
Nta speech recognition, spicificamenti in ambienti rilativamenti rumorusi comu cuntesti di cunversazzioni ô latu dâ strata o dintra n’officina di fàbbrica, a Deep Residual Shrinkage Network putissi migghiurari l’accuratezza dû speech recognition, o armenu offriri na metoduluggìa capaci di migghiurari l’accuratezza dû speech recognition.
Reference
Minghang Zhao, Shisheng Zhong, Xuyun Fu, Baoping Tang, Michael Pecht, Deep residual shrinkage networks for fault diagnosis, IEEE Transactions on Industrial Informatics, 2020, 16(7): 4681-4690.
https://ieeexplore.ieee.org/document/8850096
BibTeX
@article{Zhao2020,
author = {Minghang Zhao and Shisheng Zhong and Xuyun Fu and Baoping Tang and Michael Pecht},
title = {Deep Residual Shrinkage Networks for Fault Diagnosis},
journal = {IEEE Transactions on Industrial Informatics},
year = {2020},
volume = {16},
number = {7},
pages = {4681-4690},
doi = {10.1109/TII.2019.2943898}
}
Impattu Accadèmicu
Stu paper havi ricivutu cchiù di 1400 citazzioni supra Google Scholar.
Basatu supra statìstiche nun completi, a Deep Residual Shrinkage Network (DRSN) è stata applicata direttamenti o modificata e applicata in cchiù di 1000 pubblicazzioni/studi nta na vasta gamma di campi, inclusi ncignirìa miccànica, putenza elettrica, vision, sanità, speech, testu, radar, e remote sensing.